"A swarm doesn't need a plan to find a solution. It needs only enough agents, enough local rules, and enough time to let the solution emerge."- Claude 2026
Swarm Intelligence in Real-World Problems
Ant Colony Optimization and Particle Swarm Optimization were introduced as algorithms run on toy problems. This page covers where they — and the swarm model more broadly — get put to work.
The same mechanisms that converge on a short tour through six cities scale up to scheduling factory floors and routing traffic across continents. And the same decentralized, no-leader principle that lets a colony of ants solve a problem collectively also lets a swarm of physical robots coordinate without any single point of failure. This page moves from algorithm to application: where swarm methods are deployed, how they perform against centralized alternatives, and what documented case studies show about their effectiveness.
Learning objectives
By the end of this page you should be able to:
- Apply swarm intelligence methods to problems such as scheduling and network optimization.
- Evaluate the effectiveness of swarm intelligence in robotics and distributed problem-solving.
- Interpret case studies showcasing swarm intelligence applications.
Scheduling and Network Optimization
Two problem classes account for a large share of swarm intelligence's industrial use: deciding the order in which tasks happen, and deciding the path data takes through a network. Both reduce to the same underlying structure already covered — a graph to be searched — which is why the ACO mechanism transfers to them almost unchanged.
Scheduling: the job shop problem
- The problem: a set of jobs, each with multiple operations, must be assigned to machines in a valid order — minimize total completion time (the makespan).
- How ACO maps onto it: each ant chooses the next operation to schedule rather than the next city to visit; pheromone reinforces orderings that produced short makespans in past iterations.
- Real result: a 2023 study applying ACO at a pharmaceutical manufacturer (BIOCARE) reported ~3 hours saved in weekly production planning vs. the company's existing process.

Network optimization: routing packets like ants route trails
- The problem: each router must pick the next hop for a packet in real time, as congestion and link failures continuously change network conditions.
- How AntNet works: small "ant" packets probe the network; travel time to a destination reinforces the same way distance does in TSP — fast paths accumulate more pheromone.
- Key advantage: routing tables adapt automatically to congestion and failures with no central controller recomputing routes from scratch — the core decentralized property of swarm methods.

Both cases share a property worth naming: a decentralized algorithm, where each node or operation only needs local information, scales and adapts more gracefully than a centralized one that must recompute a global solution whenever conditions change. The job shop sequencing problem and the network routing problem differ only in what "distance" means — setup time between operations in one case, packet delay between routers in the other — which is exactly why the same ACO mechanism transfers so readily between them.
Robotics and Distributed Problem-Solving
Swarm intelligence is not only a metaphor borrowed by software running on a single machine — it is also a design philosophy for physical robots. Swarm robotics builds many simple, often interchangeable robots that coordinate using only local sensing and communication, with no central robot directing the others. This contrasts with a traditional multi-robot system, where one controller plans and assigns tasks to every unit.
The effectiveness of this approach has been demonstrated directly by researchers borrowing principles from developmental biology — the science of how cells self-organize into the shapes of organisms — to design robot behavior, treated in detail in the case studies below.
Case Studies
The following documented examples, drawn from a 2025 Nature Outlook feature on collective intelligence in robotics, illustrate swarm principles operating in physical systems rather than only in simulation.
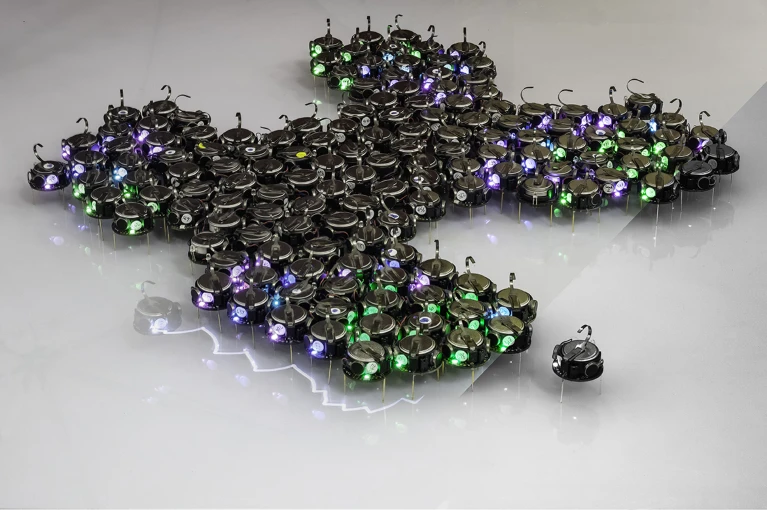
Kilobots: shape formation and self-healing
- Platform: small, cheap robots developed at Harvard; each communicates only with neighbors within ~10 cm — no global awareness.
- Experiment: a team led by James Sharpe programmed 300 kilobots to simulate a Turing pattern (the chemical-diffusion mechanism behind zebra stripes) using only local message-passing.
- Outcome: amoeba-like outgrowths emerged with no shape pre-coded in any individual robot — a textbook example of emergence.
- Follow-up: the swarm was physically split in two and self-organized back into a single group, demonstrating damage-resilience from decentralized coordination.

Adhesion-based sorting and embryo development
- Hypothesis being tested: the differential adhesion hypothesis — cells with weaker mutual adhesion migrate to surround cells with stronger adhesion during embryo development.
- Setup: Lianqing Liu's team (Shenyang Institute) built a 50-robot swarm with magnets of varying strength to mimic different adhesion levels.
- Result: robots sorted themselves into the pattern predicted by the hypothesis.
- Significance: the same effect was then verified in cell-culture experiments — swarm robotics used as a physical model to generate and test a biological hypothesis, not just solve an engineering problem.

Collective intelligence without computation
- Setup: Kirstin Petersen's team (Cornell) used spinning magnetic discs floating in water — no onboard computation in any disc.
- Forces at play: magnetic attraction pulled discs together; fluid flow from their spinning pushed them apart. Tuning this balance drove self-organization.
- Result: mixed populations of large and small discs spontaneously sorted — small discs to the center, large to the outside — with no sorting logic programmed anywhere.
- Implication: "intelligence" is a property of the interactions in the system, not of individual agents.
- Application: the same group is now pursuing swarms of nanoparticles for targeted drug delivery using the same interaction-design principles.

Tools & Tutorials
- Network Routing Simulator — an interactive, in-browser comparison of centralized (Dijkstra) and decentralized (Bellman-Ford) routing algorithms, useful for contrasting centralized and swarm-style network optimization directly.
- ARGoS Multi-Robot Simulator — an open-source, research-grade simulator built specifically for swarm robotics, capable of simulating large heterogeneous robot swarms; used widely in academic swarm robotics research.
- Application of Ant Colony Optimization for Job Shop Scheduling in the Pharmaceutical Industry — a worked, industrial case study applying ACO directly to production scheduling, including reported time savings.
Further reading
- Di Caro, G. & Dorigo, M. (1998). AntNet: Distributed Stigmergetic Control for Communications Networks. Journal of Artificial Intelligence Research, 9, 317–365. — the foundational paper applying ACO to adaptive network routing.
- el-Showk, S. (2025). Robots demonstrate principles of collective intelligence. Nature, Outlook. — the source for all three case studies above, covering kilobot, adhesion-sorting, and passive-disc swarm experiments in detail.
- Rubenstein, M., Ahler, C., Hoff, N., Cabrera, A., & Nagpal, R. (2012). Kilobot: A Low Cost Scalable Robot System for Collective Behaviors. Robotics and Autonomous Systems, 62(7), 966–975. — the original paper introducing the kilobot platform used in the shape-formation case study.